|
Visual Augmentation for Virtual Environments in Surgical Training
Abstract
Augmented reality is an important tool for surgical training and skills assessment. The use
of computer simulation, particularly the reliance on patient specific data for building
realistic models both in terms of biomechanical fidelity and photorealism has attracted
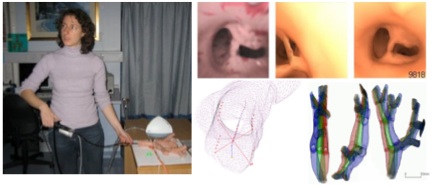
extensive interests in recent years. For example, by fusing real bronchoscopy video with 3D
tomographic data with the same patient, it is possible to generate photorealistic models that
allow high fidelity, patient specific bronchoscope simulation. In order to match video
bronchoscope images to the geometry extracted from 3D reconstructions of the bronchi,
however, robust registration techniques have to be developed. This is a challenging
problem as it implies 2D-3D registration with certain degrees of deformation and different
physiological responses.
In this thesis, we propose a new pq-space based 2D-3D registration method for camera pose
estimation in endoscope tracking. The proposed technique involves the extraction of
surface normals for each pixel of the video images by using a linear, local shape-from-
shading algorithm derived from the unique camera lighting constrains of the endoscopes.
We demonstrate how to use the derived pq-space distribution to match to that of the 3D
tomographic model. The registration algorithm is further enhanced by introducing temporal
constrains based on particle filtering. For motion prediction, a second-order auto-regressive
model has been used to characterize camera motion in a bounded lumen as encountered in
bronchoscope examination. The proposed method provides a systematic learning procedure
with modular training from ground truth data such that information from different subjects
are integrated for creating a dynamic model, which accommodates the learnt behaviour.
To cater for airway deformation, an active shape model (ASM) driven 2D-3D registration
has been proposed. ASM captures the intrinsic variability of the tracheo-bronchial tree
during breathing and it is specific to the class of motion it represents. The method reduces
the number of parameters that control the deformation, and thus greatly simplifies the
optimisation procedure. Subsequently, pq-based registration is performed to recover both
the camera pose and parameters of the ASM. Radial Basis Functions (RBFs) are employed
to smoothly warp the 3D mesh based on the ASM point correspondences. The method also
exploits the recent development of five degrees-of-freedom miniaturised catheter tip
electromagnetic trackers such that the position and orientation of the bronchoscope can be
accurately determined under dis-occlusion and bleeding artefacts. The accuracy of the
proposed method has been assessed by using both a specially constructed airway phantom
with an electro-magnetic tracker, and in vivo patient data.
My PhD was sponsored by EPSRC(GR-R56822-01). You can download my PhD thesis here (5.6MB).
|